協力して頂いている農場の田植えが終わったので、水稲圃場の空撮を始めていきます。撮影機器は以下の三種を使用します。
- IRPRO NDVI7(DJI Phantom3 Professional搭載)
- MAPIR Survey2(TBS Discovery Pro搭載)
- RGBカメラ(DJI Phantom4)
それぞれの機器は以前の記事で紹介したものです。対象範囲は高地と平地部の水稲圃場を撮影します。田植えは約一ヶ月前にに終了しており、稲も空中から判別可能な大きさになっていると思います。飛行時にはそれぞれ自動操縦機能を使用してオーバーラップ及びサイドラップを確保するようにします。なお、自動操縦機能は以下のアプリを使用します。
- DJI iPad GroundStation (TBS Discovery Pro)
- DJI GroundStation Pro (DJI Phantom3, DJI Phantom4)
iPad GroundStationはDiscovery Proに搭載している2.4Ghz DATA LINKの専用アプリです。機体に搭載している子機と地上局の親機が通信し、親機はBluetoothを介してiPadのアプリと機体の情報をやり取りします。このアプリは機体に搭載されているフライトコントローラー(DJI NAZA M V2)から得られる情報をiPad上で把握でき、アプリ上で計画したウェイポイントを機体側に送信することで自動操縦を開始、その実施状況も確認することができます。
GroundStation Proは最近DJIから販売された殆どの機器に対応する自動操縦用アプリです。対応機はPhantom3以降のPhantomシリーズ、Inspireシリーズ、Matriceシリーズになります。Proになることで、接続している機器を認識するようになるので、PhantomやInspire等の一体型のカメラであれば画角や焦点距離に応じたコース設計を範囲を指定するだけで自動で行ってくれます。
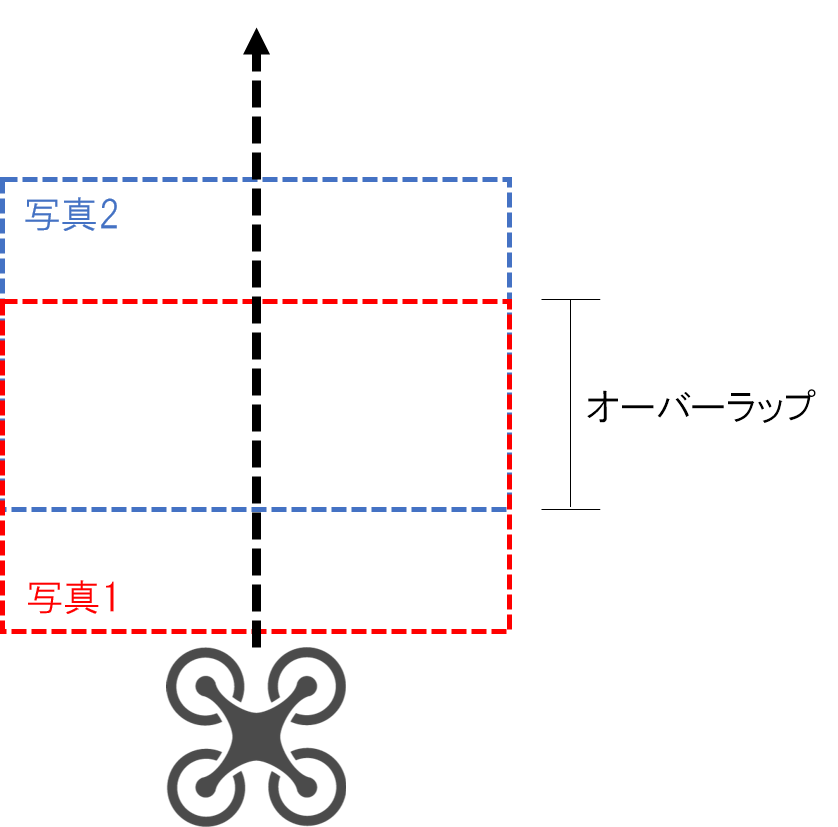
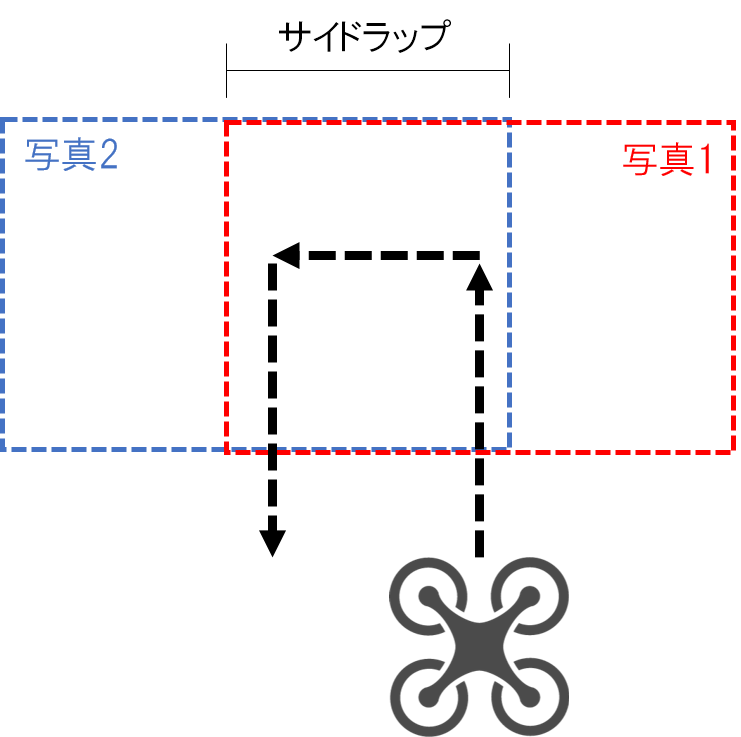
サイドラップ、オーバーラップは範囲内を連続で撮影する際に各写真間の重なり量の指標です。先の記事で紹介したOpenDroneMap等のsfMソフトからオルソ画像を作成するために考慮する要素です。サイドラップが写真の横(幅)方向の重なり、オーバーラップは縦(高さ)方向の重なりを示します。例えば、サイドラップ90%なら横に並んだ写真は少し横にずれた程度に思える程度、オーバーラップ80%で撮影された連続写真をスライドショーで見てみるとコマ送りの動画のように見えます。それぞれのラップを気にする理由はまた別記事で紹介できればしようかと思います。ここでは単純に重なっている範囲が多ければ多い程良いと考えていいと思います。(大雑把な考え方ですが)
さて、このラップ量を確保するように飛行するためには大よそ以下のような条件を考慮する必要があります。
- 飛行可能時間
- 飛行高度
- 飛行速度
- カメラ性能
まず、飛行可能時間は最も重要です。飛行計画を設定しても、バッテリー容量に余裕を残した時間内に収めなければ、離陸地点に帰ってこられず機体は落ちていきます。なので、コース設計は最終的に飛行可能な時間内に収めることを前提とします。この飛行可能時間は、Phantom3等のDJI製のインテリジェントフライトバッテリーを使用しているものはバッテリー容量の残量を%で示し、残りの推定飛行可能時間も把握することができます。
問題はDiscovery Proのような従来のLipoバッテリーを使用する機体です。LiPoバッテリーの詳細については省略しますが、簡単に言うと自由度の高い形状で作成することができる高エネルギーのバッテリーで、発火等の危険もあるため取扱いに注意が必要とされます。ドローンに使用される従来のLiPoバッテリーはその状態を電圧で管理するため、飛行中に電圧の低下量から飛行の継続可否を判断します。機械が推定してくれるかどうかの違いですが、どの程度まで電圧が下がったら危険かを把握していなければならないという点で慣れが必要とされます。先述したインテリジェントフライトバッテリーもこのLiPoバッテリーに該当しますが、DJI GOアプリ等から残量が把握できるようになっているため、安全性が向上しています。
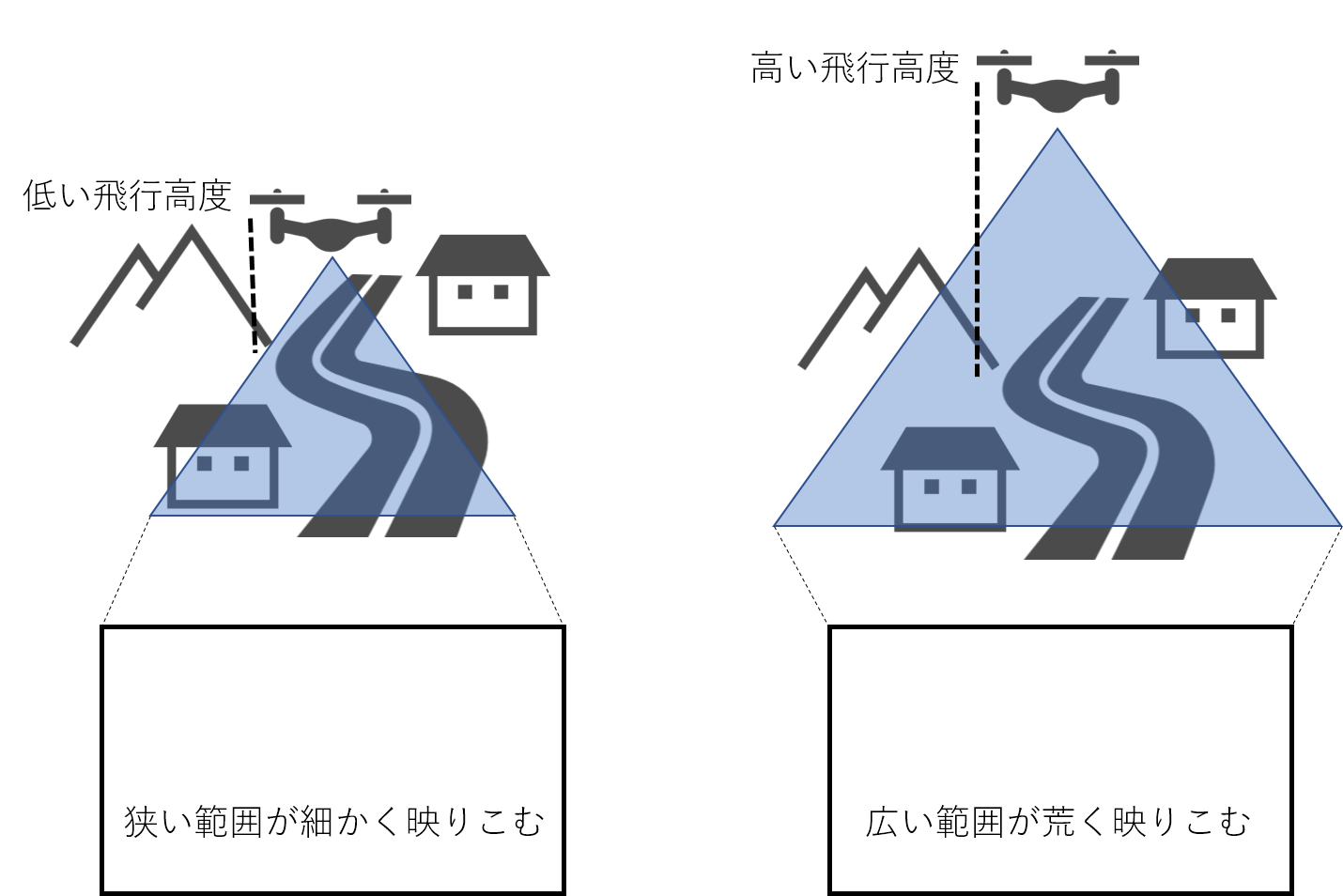
次に飛行高度を検討します。飛行高度は成果となるオルソ画像の地上分解能に影響します。飛行高度が低ければ一枚の写真に写る範囲は狭くなりますが、被写体である地上までの距離が近いので細かな地物まで取得することができます。逆に高度が上がると一枚の写真に写る範囲は広くなりますが、地上地物の映り方は荒くなります。よって、より細かいオルソ画像を作成するならば飛行高度は低い程良いとい言えます。
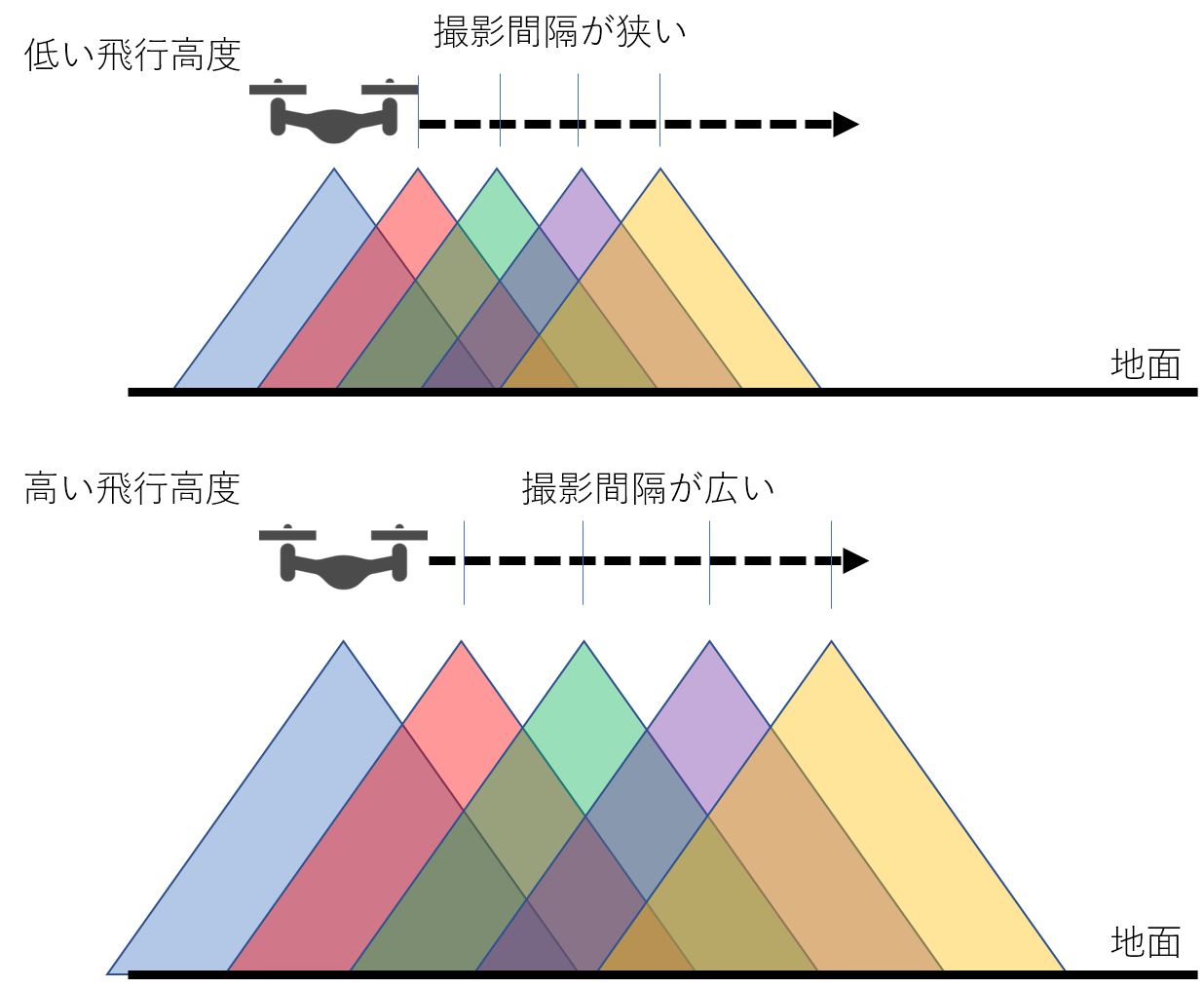
しかし、飛行高度を低くして一回の撮影範囲を狭くすると上記のオーバーラップ量を確保するために相応の枚数の写真を撮影しなければなりません。写真枚数が増えるということはそれだけ頻繁にシャッターを切らなければならないということですが、カメラが連続でシャッターを切る速度にも限界があります。
撮影はカメラのTimelapse機能で定時間間隔で撮影しますが、以下のように約1秒間隔が最速と考えて良いと思います。
| カメラ名 | Timelaps間隔(最速) | 備考 |
| DJI Phantom3 | 1秒 | RAW画像保存時は最低5秒 |
| MAPIR Survey2 | 0.5秒 | microSDへの書込時間を要考慮 |
| DJI Phantom4 | 1秒 | RAW画像保存時は最低5秒 |
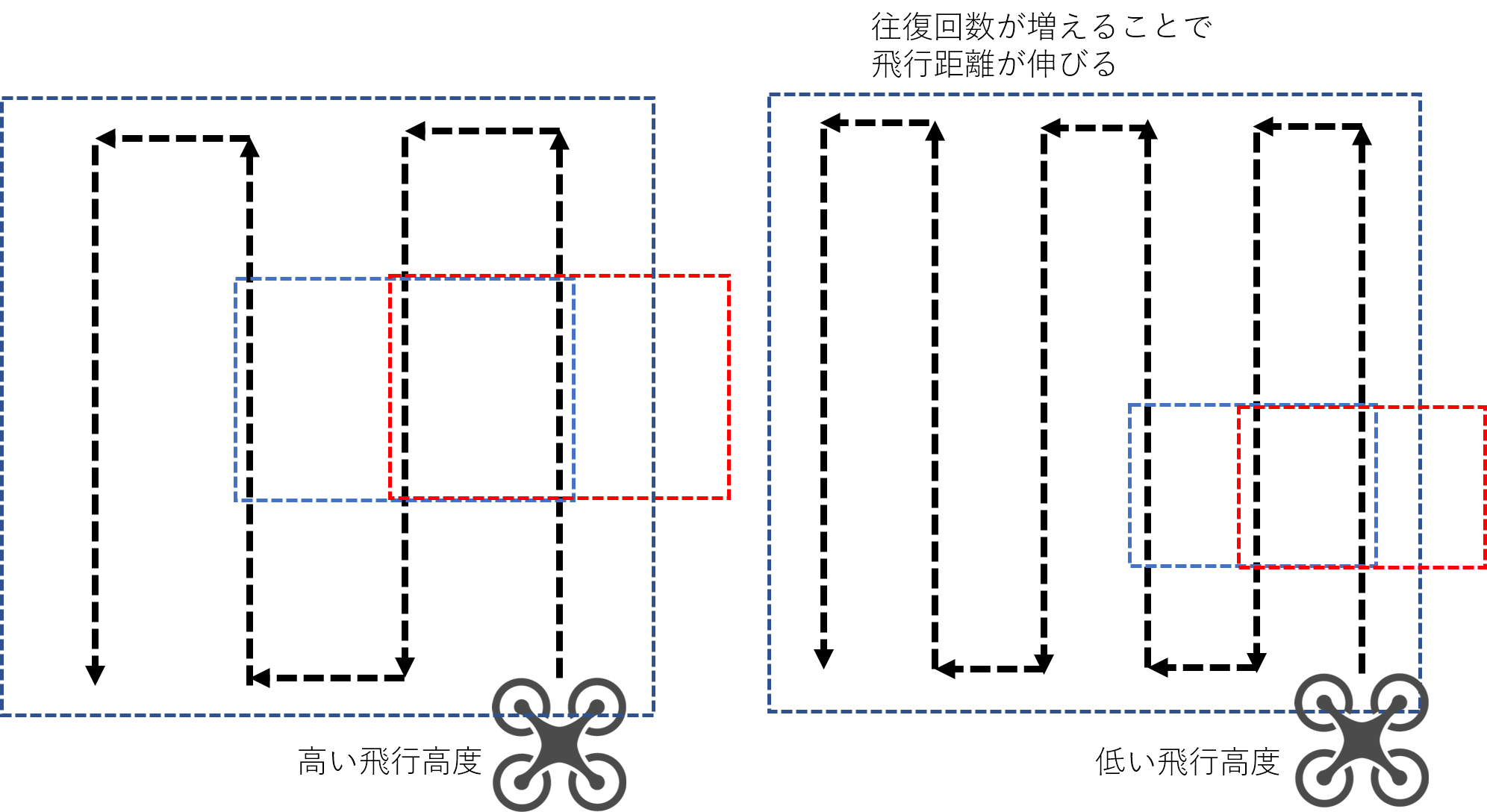
飛行高度の高低は飛行距離にも影響します。サイドラップ量を確保しながら飛行する場合、対象範囲内をコの字状に往復しながら飛行します。飛行高度が低い場合はサイドラップを確保するためにコース間隔を狭くする必要があるため往復回数が増え、飛行距離が伸びてしまいます。飛行距離が伸びると比例して飛行時間も長くなるため対象範囲を網羅するために飛行回数が増えてしまいます。
飛行距離が伸びたならば、速度を上げることで飛行時間は短縮できますが、速度が速くなりすぎるとカメラのシャッター間隔が追い付かなくなり十分なラップ量が確保できない、速度に対してシャッター開放時間が長くなり手ブレしたような画像になってしまうといったことが考えられるため、速度の上げ過ぎも注意しなければなりません。
以上のように飛行高度、速度、カメラ性能を考慮して飛行可能時間内に完了するよう計画を立てなければなりません。GroundStation Proは飛行高度とラップ量を指定することでコース、速度及びカメラ設定を自動で設定してくれます。iPad GroundStationは範囲と頂点数を指定することでコースは自動的に作成してくれますが、頂点数は高度とサイドラップ量で左右されるので、適切な数値を検討する必要があります。
最後に、自動操縦を行う際の位置管理は機体のGPSの座標情報を基していますが、この座標情報は単独測位で得られるものであることから誤差が1~2m位は出ると考えて余裕を持たせることも必要です。
Leave a Reply