MAPIRはNDVIカメラ用のキャリブレーションボードを販売してます。また、校正処理用のQGIS Pluginも公開していたので、校正ボードを使用した撮影~校正処理の手順を紹介します。
撮影
撮影作業で必要となるのは飛行前にボードを撮影しておくということだけです。注意点としては、ボード撮影時と空撮時のカメラ設定を一定にしておくことと、飛行時に雲の隙間から晴れ間が見えて太陽光の照射状態が大きく変化しないようにすることかと思いいます。以下、実際にSurvey2で撮影したキャリブレーションボードの画像です。三種の反射板と独自のQRコードが張り付いており、プラグインに入力することで、補正値を算出してくれます。

QGIS Pluginのインストール
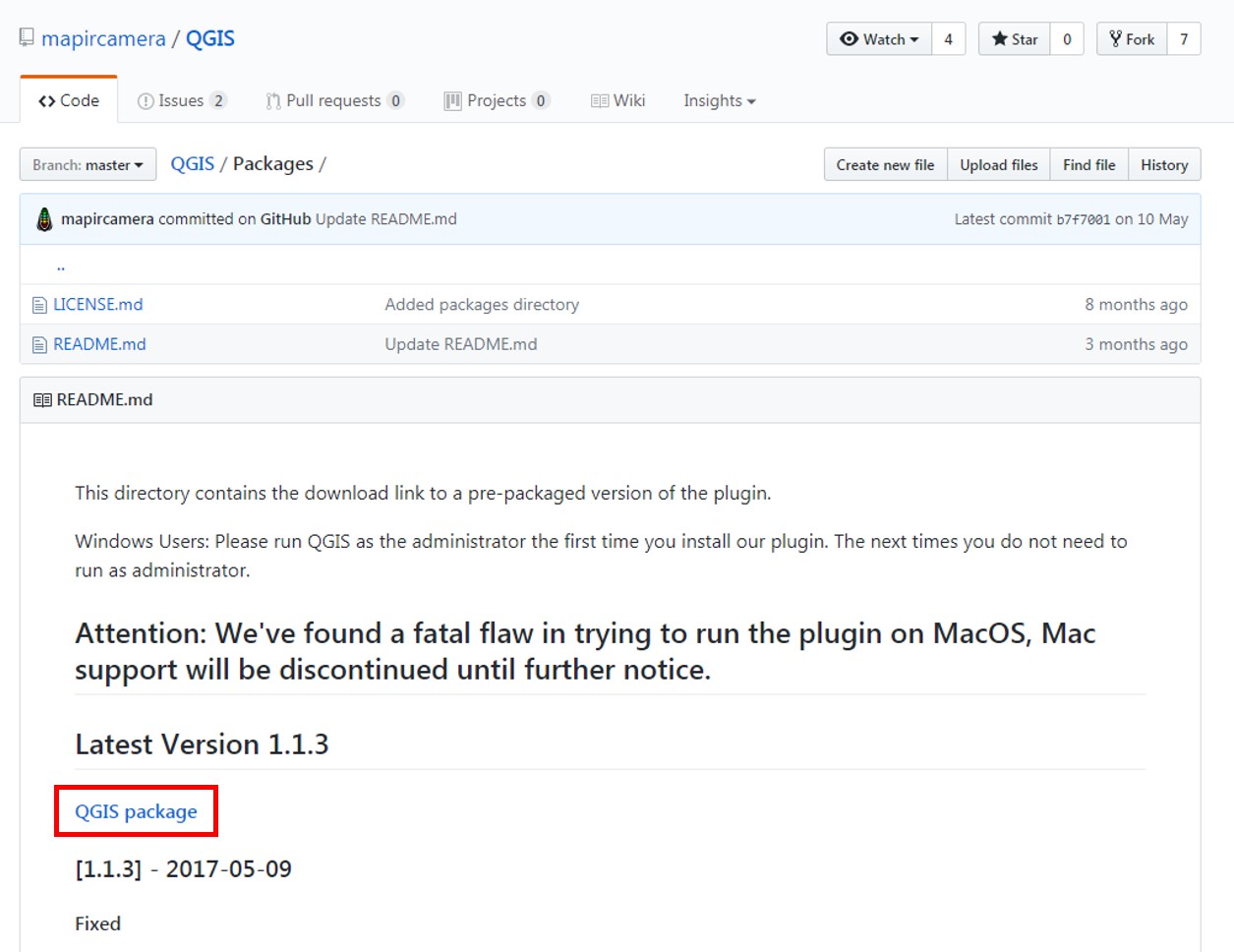
MAPIRが公開しているpluginをインストールします。まず、GitHubからソースデータをダウンロードします。
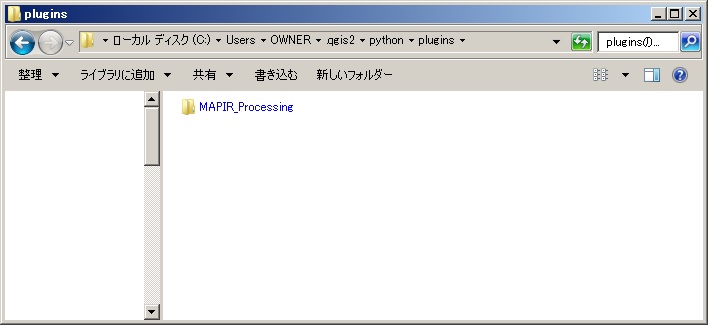
インストールの手順は上リンク先のReadmeによると、QGISのPluginフォルダ(C:\Users\ (コンピュータ名)\ .qgis2\python\plugins)にダウンロードした”MAPIR_Processing”フォルダを保存するだけです。
QIGSを起動後、メインメニューのプラグインの下部にMAPIRが追加されていればインストール完了です。なお、QGISはこちらから入手します。また、起動してもエラーが出る場合は、こちらのリンク先からQGIS Packageをダウンロードして、試してみて下さい。
RAW画像の変換
MAPIRカメラはRAW形式での保存が可能です。キャリブレーションもこのRAW画像に対して行うことを推奨しているようです。RAW画像はDNGの拡張子で保存されているので、これをプラグインの機能でTIFF形式に変換します。
メインメニューのプラグインからMAPIR > MAPIRと選択することで、プラグインが起動します。Processタブが開いているので、ここに処理設定を入力していきます。
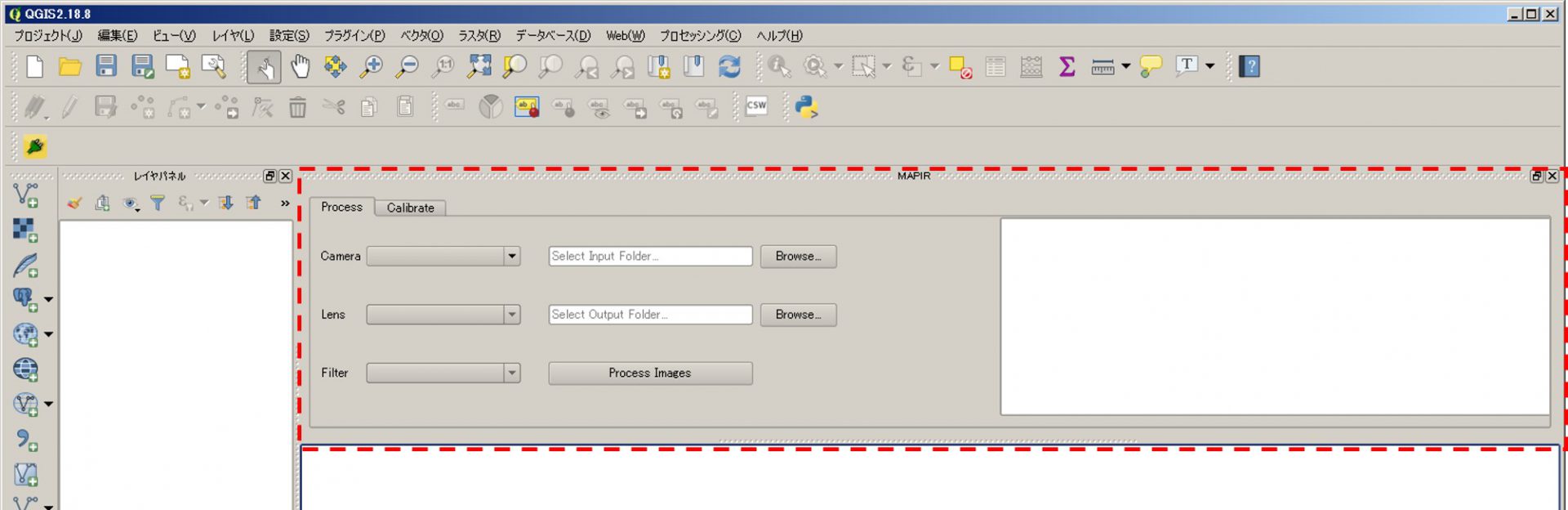
・Camera:プルダウンで撮影したカメラを選択します。今回はSurvey2を選択しますが、DJI Phantom3やPhantom4にも対応しています。
・Lens:Cameraを設定することで自動的に設定されます。
・Filter:使用したカメラに合わせてプルダウンメニューから選択します。今回はRed + NIR(NDVI)を選択しています。
・Select Input Folder …:Browseを選択して、撮影した画像データが保存されているディレクトリを指定します。
・Select Output Folder …:Browseを選択して、処理後データを保存するディレクトリを指定します。
上記項目を入力後、Process Imagesを押すと、画面右に処理進行状況が表示されます。なお、入力データ量が多いと処理時間も相応に必要となります。
キャリブレーションの実施
撮影したキャリブレーションボード画像から補正値を取得してキャリブレーションを実施します。
MAPIRプラグインのCalibrationタブを開き、以下項目の設定を入力します。
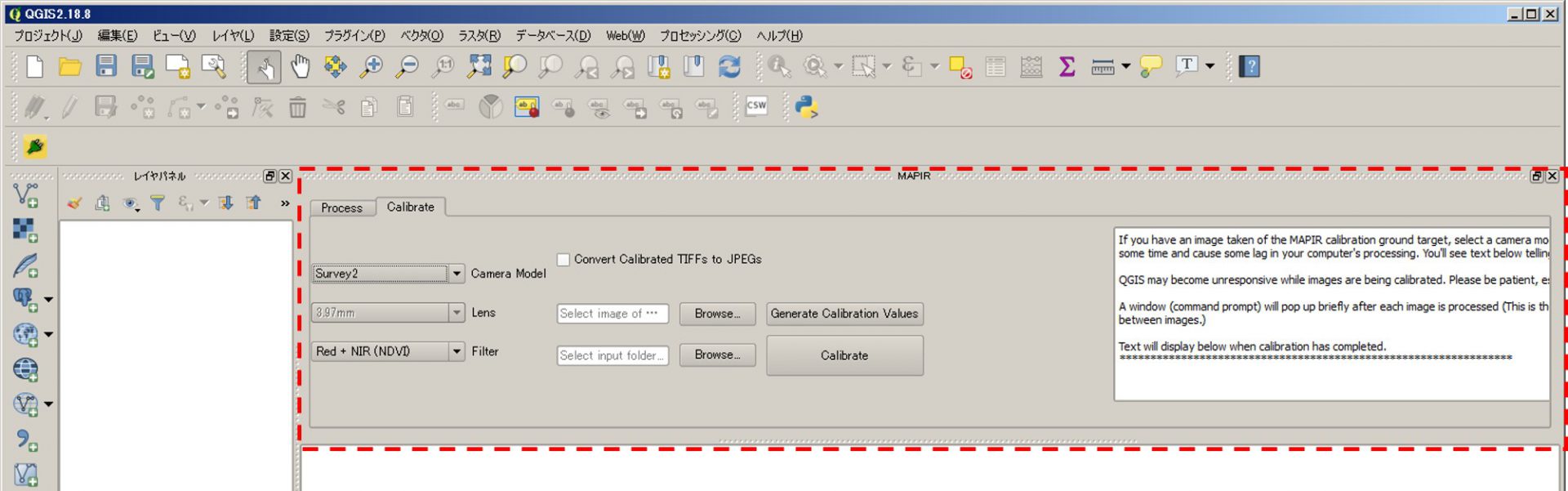
・Camera:プルダウンで撮影したカメラを選択します。今回はSurvey2を選択しますが、DJI Phantom3やPhantom4にも対応しています。
・Lens:Cameraを設定することで自動的に設定されます。
・Filter:使用したカメラに合わせてプルダウンメニューから選択します。今回はRed + NIR(NDVI)を選択しています。
・Select image of ・・・:Browseを選択して、キャリブレーションボードの画像を選択します。
・Select input folder …:入力画像が保存されているディレクトリを指定します。ここでは、TIFF形式に変換したRAW画像の保存ディレクトリを指定します。
上項目を設定後、Create Calibration Valuesを押し、画面右スペースに補正値が抽出されたことを表示されるのを待ちます。補正値が取得された後に、Calibrateを押して、補正処理を開始します。右スペースに完了のメッセージが表示された後に、指定した入力画像フォルダ内に処理後データが保存されたフォルダが作成されているのを確認します。
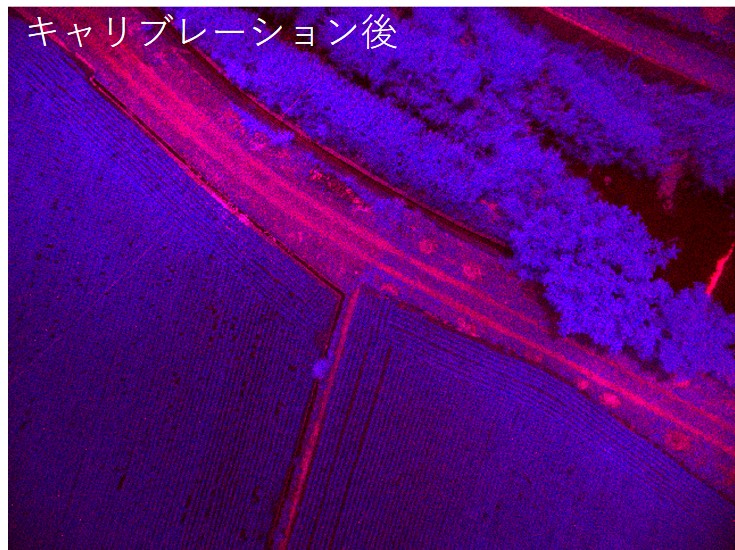
後は補正処理後の画像データを用いてSfmソフト等を用いてオルソ画像を作成します。以下、キャリブレーション前後の画像サンプルです。処理前データには緑バンドに数値が収まっていましたが、処理後には赤と青のみに数値が入っていたので処理前後で表示設定を統一いています。処理前後の差としては、NIRに該当する青バンドに大きな変化はありませんでしたが、赤バンドの数値が非常に小さくなっていました。結果、処理前画像のNDVI値は-0.68~0.15の数値幅でしたが、処理後のNDVI値は-0.84~1.00となっているのでキャリブレーションは成功している思えます。

Leave a Reply